- 前言
- Numpy
- SciPy
- pandas
- 类函数的编写
- 处理矩阵经常用到的
- 获取xml中的数据
* [xml中节点包含的属性:](#xml中节点包含的属性) * [节点类型](#节点类型) * [python获取xml节点:](#python获取xml节点) * [打印标签对之间的数据](#打印标签对之间的数据) - 正则匹配
- 其他
- 小技巧
- 参考
前言
用python有近一年多的时间了,但水平还是很差,闲来无事,记录一些自己感觉有用的东西,仅此而已。
Numpy
ndarray 对象
可以通过给 array()函数传递 Python 的序列 对象来创建数组。数组的形状可以通过其shape 属性获得,它是一个描述数组各个轴长度的元组(tuple)。当设置某个轴的元素个数为-1 时,将自动计算此轴的长度。使用数组的 reshape()方法,可以创建指定形状的新数组,而原数组的形状保持不变。zeros()、ones()、empty()可以创建指定形状和类型的数组。其中:empty()仅仅分配数组所使用的内存,不对数组元素进行初始化操作,因此它的运行速度是最快的。
fromfunction()的第一个参数为计算每个数组元素的函数,第二个参数指定数组的形状。如生成9*9的乘法序列:
def fun(i,j): |
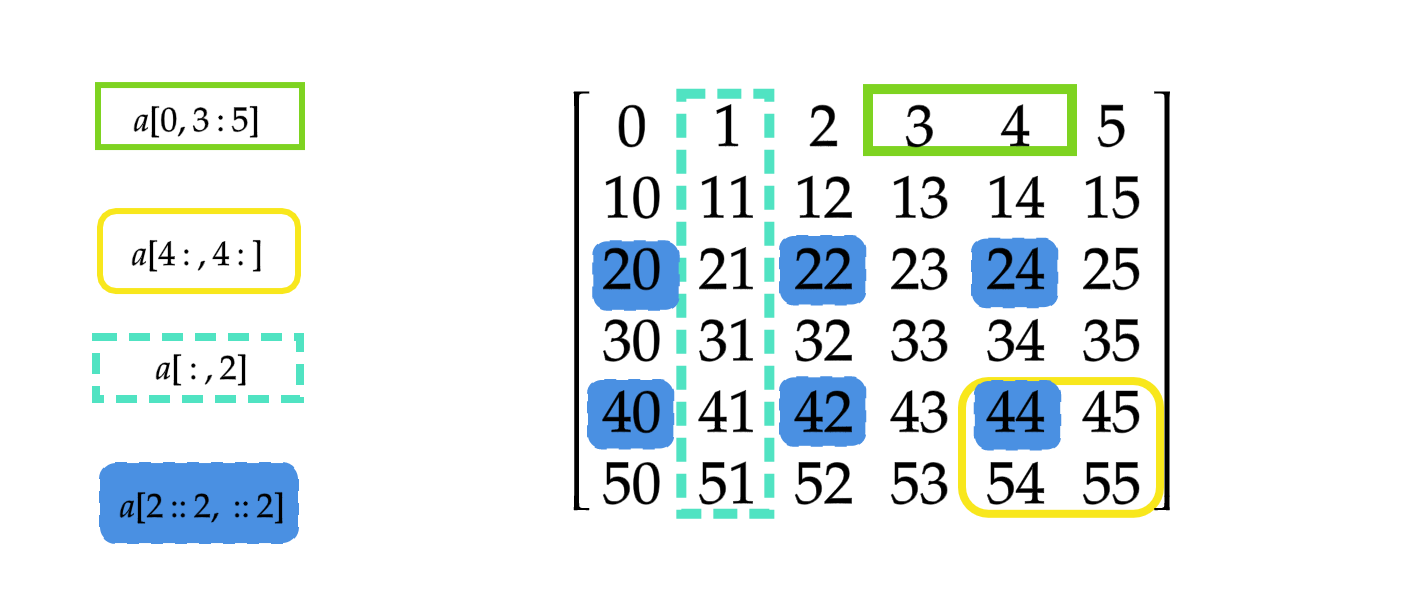
关于切片,感觉还是利用形象的记忆比较有效,如下图所示
标准Python 中有比 for 循环更快的方案——使用列表推导式。但是列表推导式将产生一个新的列表,而不是直接修改原来列表中的元素。如
x = [math.sin(t) for t in x] |
SciPy
SciPy在NumPy的基础上增加了众多的数学、科学以及工程计算中常用的模块,例如线性代数、常微分方程数值求解、信号处理、图像处理、稀疏矩阵,等等。
优化——optimize
最小二乘拟合
最小二乘是自己做参数辨识中最常用的一种方法了,假设有一组实验数据(xi , yi),我们事先知道它们之间应该满足某函数关系yi=f(xi),通过这些已知信息,需要确定函数f的一些参数。例如,如果函数f是线性函数 f(x)=kx+b,那么参数 k和b 就是需要确定的值。如果用p表示函数中需要确定的参数,那么目标就是找到一组p,使得下面的函数S的值最小:
这种算法被称为最小二乘拟合(Least-square fitting)。在optimize 模块中,可以使用leastsq()对数据进行最小二乘拟合计算。
pandas
虽然pandas采用了大量的NumPy编码风格,但二者最大的不同是pandas是专门为处理表格和混杂 数据设计的。而NumPy更适合处理统一的数值数组数据。
默认使用使用下面的方式引入pandas:
import pandas as pd |
因为Series和DataFrame用的次数非常 多,所以将其引入本地命名空间中会更方便:
from pandas import Series, DataFrame |
要使用pandas,你首先就得熟悉它的两个主要数据结构:Series和DataFrame。
Series
Series是一种类似于一维数组的对象,它由一组数据(各种NumPy数据类型)以及一组与之相关 的数据标签(即索引)组成。仅由一组数据即可产生最简单的Series:
obj = pd.Series([4, 7, -5, 3]) |
Series的字符串表现形式为:索引在左边,值在右边。由于没有为数据指定索引,于是会自动创建一个0到N-1(N为数据的长度)的整数型索引。可以通过Series 的values和index属性获取其数组表示形式和索引对象:
obj.values |
可以通过Series带有可以对各个数据点进行标记的索引:
obj = pd.Series([4, 7, -5, 3], index=['d', 'b', 'a', 'c']) |
这样就可以通过索引的方式选取Series中的单个或一组值, 如:
obj['a'] |
如果数据被存放在一个python字典中,也可以直接通过这个字典来创建Series:
data = {'Ohio': 35000, 'Texas': 71000, 'Oregon': 16000, 'Utah': 5000} |
对于许多应用而言,Series最重要的一个功能是,它会根据运算的索引标签自动对齐数据。
类函数的编写
已自己写的简单的串联机器人的运动学为例,
class robot: |
调用的话,就比较简单了:
dhPar = np.array([[ 0, 154, 0, -90, 0], |
处理矩阵经常用到的
利用行列向量生成对角阵
这个问题的引入是在自己做辨识的时候用上的,需要将力矩向量变成对角矩阵,然后进行辨识。
大致有三种方法,np.array + np.diag,np.array + np.identity,np.matrix + np.diagflat。其中最快的属于第一种,下面给出第一种的使用:
tau = np.array(tau) |
矩阵的合并
矩阵合并用的最多的是np.append, 比如np.append(m1,m2,axis = 0) 表示合并列,和matlab [a;b], 很相似,类似的,np.append(m1,m2,axis=1)和 matlab [a,b] 类似,为列合并。
获取xml中的数据
这个是为了方便自己在读取DH参数的时候用到的。
xml中节点包含的属性:
1, nodeName——节点名称 |
节点类型
1, 元素节点 |
python获取xml节点:
DH.xml文件 (简单的例子)
|
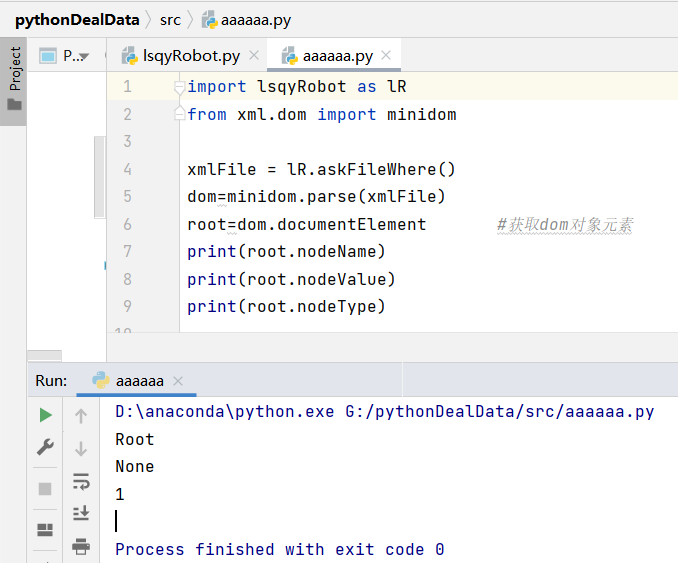
代码:
import lsqyRobot as lR |
其中 askFilewhere() 在 lsqyRobot.py (为方便自己写的函数包)代码如下
def askFileWhere(): |
运行结果如下
这里如果想在打开文件的时候给予提示,可将 askFileWhere()改写为:
def askFileWhere(tit): |
打印标签对之间的数据
node.firstChild.data |
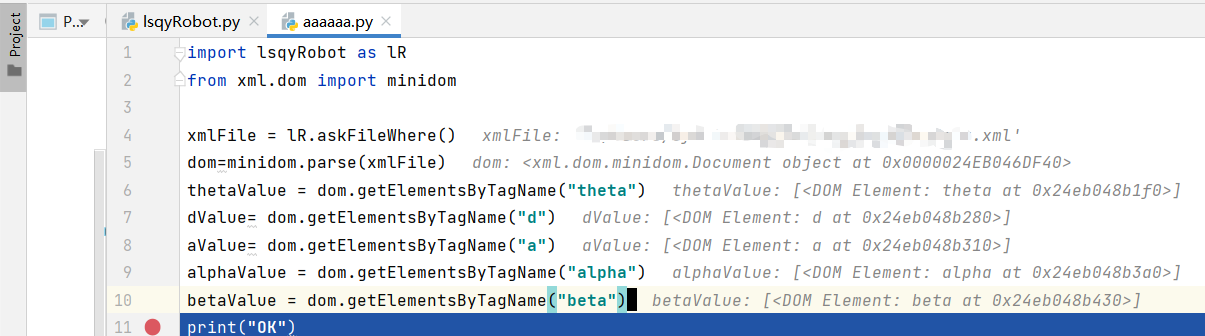
代码如下:
import lsqyRobot as lR |
运行结果如下(调试状态,其实都可以看到值,感兴趣的自己去尝试下,并不难)
目前就记录到这,用到再记了。
正则匹配
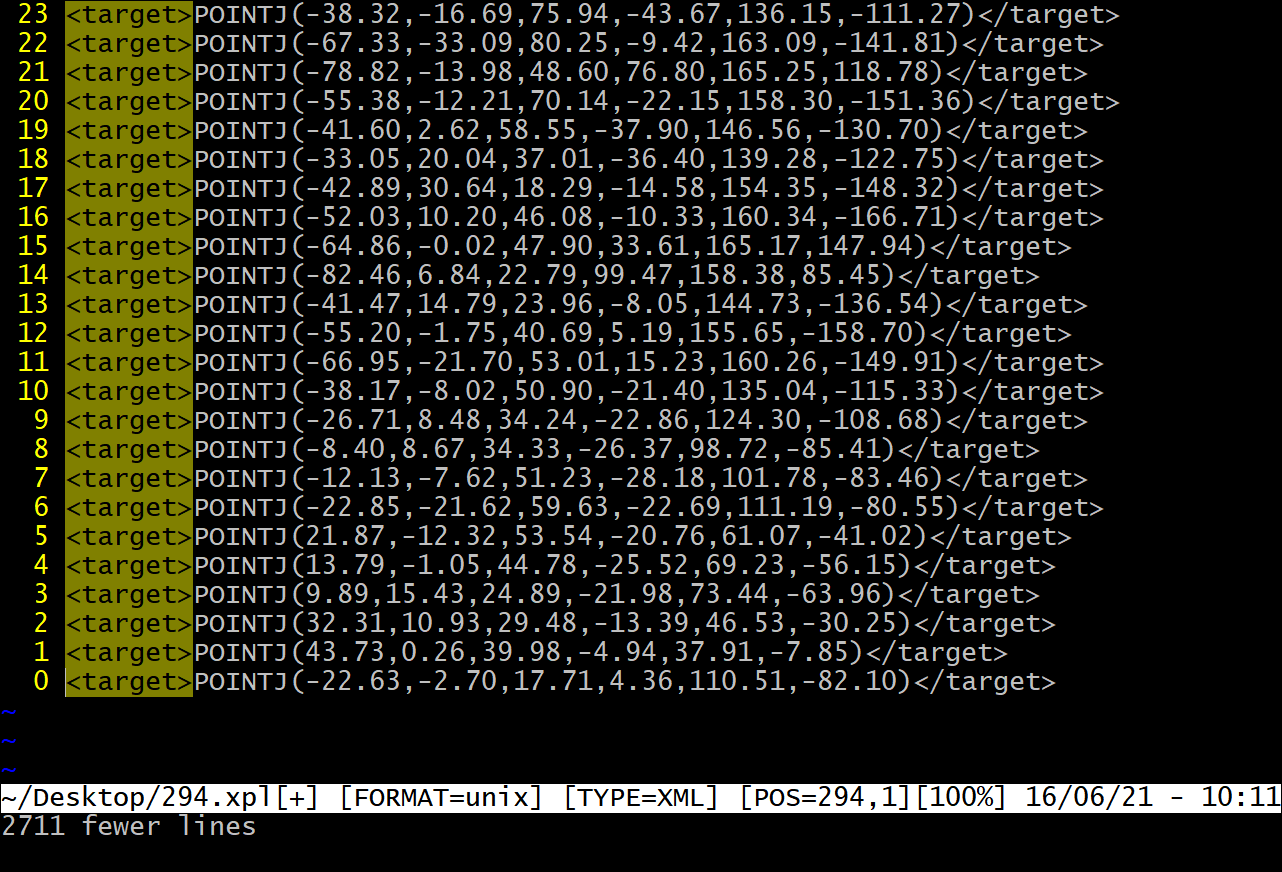
事情的起因是要筛选标定程序里的一些点的,由于在标定的时候,自动生成的点位(一般是朝着一个方向,即姿态不怎么发生变化),需要实际去跑这些点位,可有的时候自动生成的点位无法保证是安全的,这样就需要手动去调整,这个时候需要筛选出调整后的点位。比如最后调整好的文件可能是长成这样的:
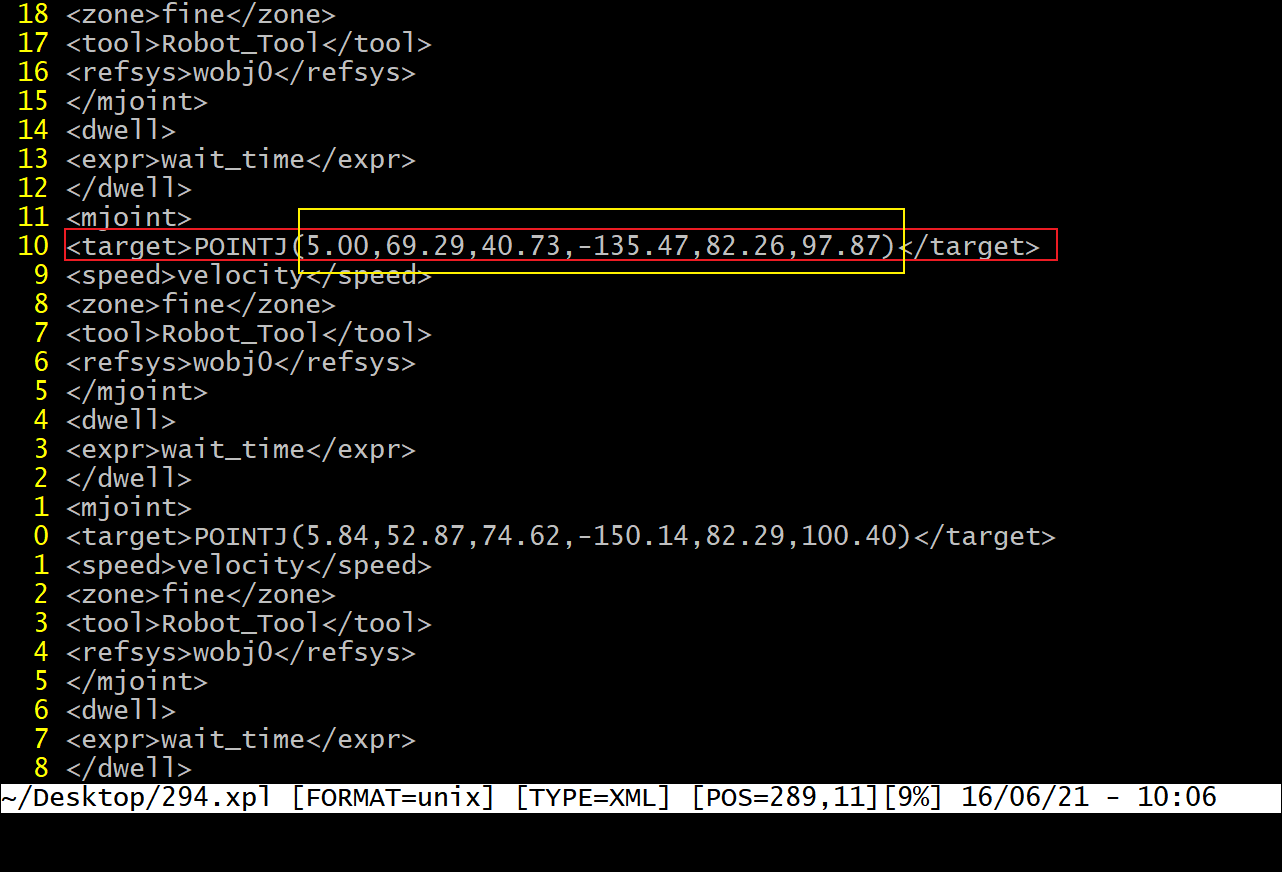
不过只需要里面的数字,就是画黄线那部分,还需要将,,变成Tab, 或者是\t,用 vim 的正则等可以非常快的(大概一分钟)就能解决这个问题, 第一步,除了选中部分,其他部分均删除:
:v /<target>/d |
通过这一步就差不多把需要的给筛选出来了
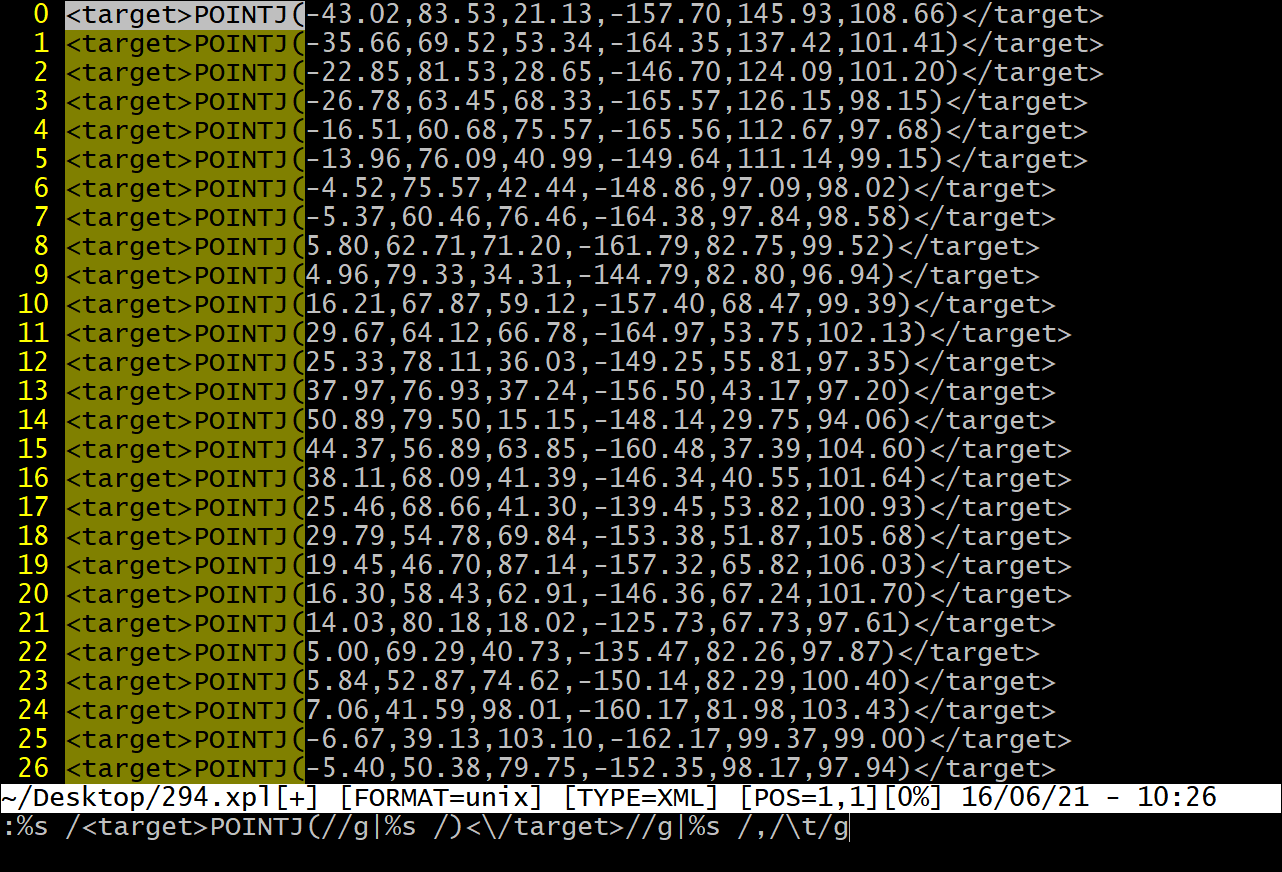
剩下的就是简单的vim正则替换了:
:%s /<target>POINTJ<//g|%s /)<\/target>//g|%s /,/\t/g |
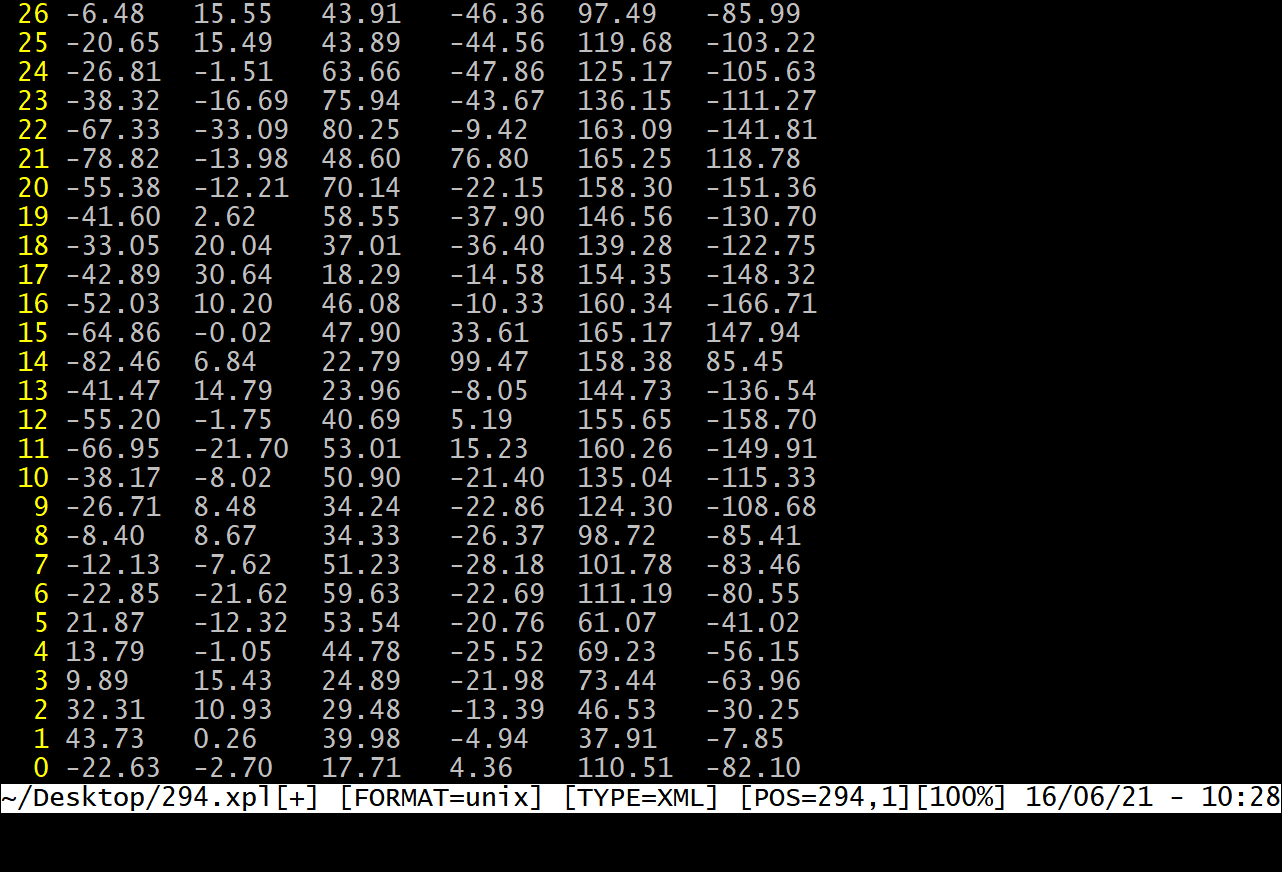
这个前提是对 vim 的正则替换有些熟悉,哪怕几百万行,替换的时间也是非常短的,当然,这种核心思想在于正则替换,使用python一样可以做。
正则表达式
正则表达式提供了一种灵活的在文本中搜索或匹配(通常比前者复杂)字符串模式的方式。正则表 达式,常称作regex,是根据正则表达式语言编写的字符串。Python内置的re模块负责对字符串应 用正则表达式。
re模块的函数可以分为三个大类:模式匹配、替换以及拆分。当然,它们之间是相辅相成的。一个 regex描述了需要在文本中定位的一个模式,它可以用于许多目的。
re.compile 函数
compile 函数用于编译正则表达式,生成一个正则表达式( Pattern )对象,供 match() 和 search() 这两个函数使用。语法格式为:
re.compile(pattern[, flags]) |
其他
动态生成变量名
在我的收藏夹吃灰了好久,收藏的具体原因给忘了,应该不怎么常用
如果你想生成v1,v2…v100这一百个变量,使用其他静态编译语言只能在代码中手动写出这100个变量名,但是在python中可以使用循环方便地动态生成。 python中有一个函数locals(),定义是:
locals(...) |
即返回当前作用域的所有变量, 所以可以用这个函数来创建变量
for i in range(4): |
小技巧
1, 在使用np.array的时候,默认是以科学计数法来显示的,在写机器人代码的时候与示教器上的数值进行核对时,会有些费事,使其正常显示可以设置为
np.set_printoptions(suppress=True) |
2, 保存高清图像,指定 dpi 与设置bbox_inches=‘tight’,这里dpi越大,越清晰,当然,导出的时间也越慢。
plt.savefig('./yourPic.jpg',dpi=500,bbox_inches = 'tight') |
参考
[1] 《python 科学计算》—— 张若愚等著
[2] 《利用 Python 进行数据分析》——Mckinney Wes
[3] 龟的小号
[4] (Python 动态生成变量名)(https://blog.csdn.net/Baoli1008/article/details/47980779)
