前言
这里以一个例子来阐述下怎么搭建功能包的过程, 在整个构建的过程莫过于CMakeLists编写内容所代表含义那块有点不理解,多看几遍书和其他人写的博客也就慢慢的理解了;
创建功能包
创建ROS功能包的命令如下:
catkin_create_pkg [功能包名称] [依赖功能包1] [依赖功能包n] |
“catkin_create_pkg”命令在创建用户功能包时会生成catkin 构建系统所需的CMakeLists.txt和package.xml文件的包目录, 这部分专门做了记录,这里不再赘述。输入命令行移动到工作的目录:
cd ~/catkin_ws/src |
和书籍[1]里面保持一致,使用以下命令创建一个名为my_first_ros_pkg的功能包:
catkin_create_pkg my_first_ros_pkg std_msgs roscpp |
上面用“std_msgs”和“roscpp”作为前面命令格式中的依赖功能包的选项。这意味着为了使用ROS的标准消息包std_msgs和客户端库roscpp(为了在ROS中使用C/C++),在创建功能包之前先进行这些选项安装。这些相关的功能包的设置可以在创建功能包时指定,也可以在创建之后直接在package.xml中输入。
如果已经创建了功能包,“~/catkin_ws/src”会创建“my_first_ros_pkg”功能包目录、ROS功能包应有的内部目录以及CMakeLists.txt和package.xml文件。可通过如下指令去查看此目录下的文件内容:
ls my_first_ros_pkg |
修改构建配置文件CMakeLists:
cmake_minimum_required(VERSION 2.8.3) |
编写源代码
在上述CMakelists.txt文件的可执行文件创建部分(add_executable)中,进行了以下设置:
add_executable(hello_world_node src/hello_world_node.cpp) |
换句话说,是引用功能包的src目录中的hello_world_node.cpp源代码来生成hello_world_node可执行文件。由于这里没有hello_world_node.cpp源代码,需要进行编写,
首先,用cd命令转到功能包目录中包含源代码的目录(src),并创建hello_world_node.cpp文件
cd ~/catkin_ws/src/my_first_ros_pkg/src/ |
之后如下修改代码:
|
构建功能包
所有构建功能包的准备工作都已完成。在构建之前,使用以下命令更新ROS功能包的配置文件。这是一个将之前创建的功能包反映在ROS功能包列表的命令,这并不是必选操作,但在创建新功能包后更新的话使用时会比较方便。
rospack profile |
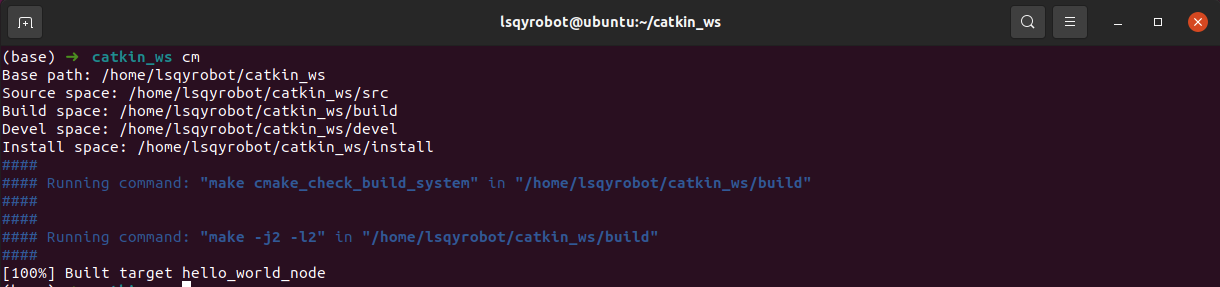
之后进行catkin构建。移动到catkin工作目录后进行catkin构建
cd ~/catkin_ws && catkin_make |
构建成功后,可参考下图所示
运行节点
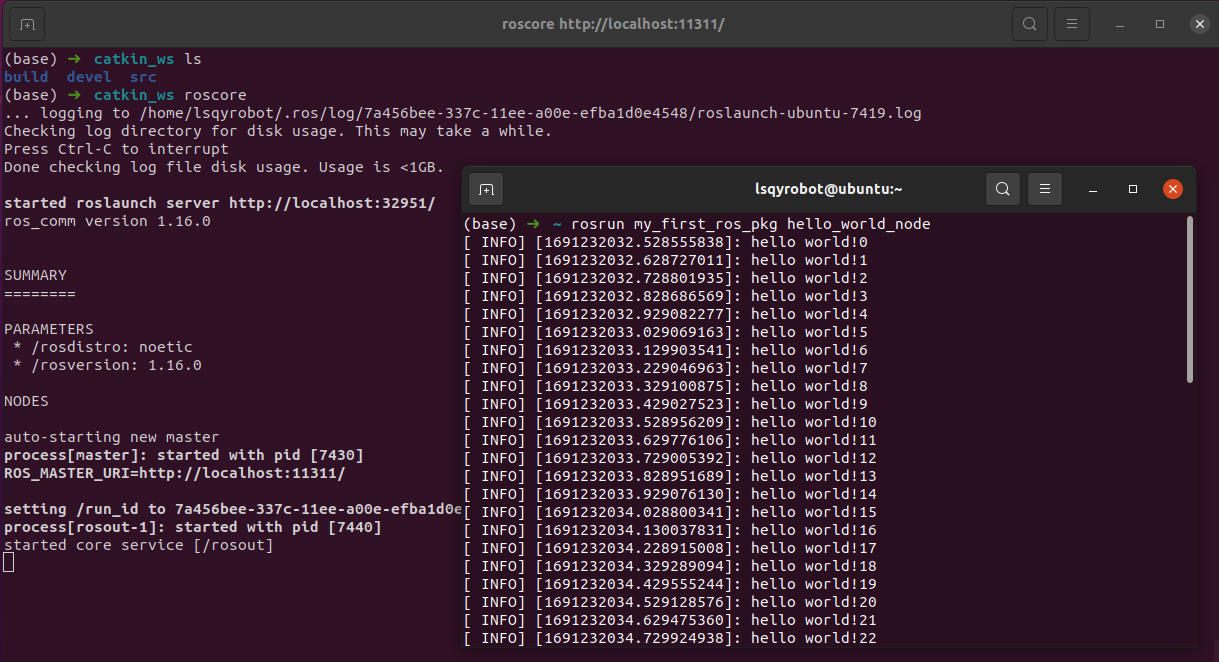
如果构建无误,那么将在“~/catkin_ws/devel/lib/my_first_ros_pkg”中生成“hello_world_node”文件。 下一步是运行该节点,打开一个终端窗口(Ctrl + Alt + t)并在运行该节点之前先运行roscore。请注意,运行roscore后,ROS中的所有节点都可用,除非退出了roscore,否则只需运行一次。
roscore |
最后,打开一个新的终端窗口(Ctrl + Alt + t)并使用以下命令运行节点。这是在名为my_first_ros_pkg的功能包中运行名为hello_world_node的节点的命令。
rosrun my_first_ros_pkg hello_world_node |
运行效果如图所示
参考
[1]. 《ROS机器人编程—从基本概念到机器人应用程序编程实战》
