在了解角速度这块的时候,有必要了解一些基础的知识;
反对称矩阵
AT=−A
称其为反对称矩阵,将向量表示成反对称矩阵如下
[ω]=0ω3−ω2−ω30ω1ω2−ω10
后面用符号**[x]**来表示向量x的反对称矩阵,将所有的3*3反对称矩阵称为so(3), 其中so表示反对称矩阵,定义如下
so(n)={S∈Rn×n:ST=−S}
其中反对称矩阵so(3)称为SO(3)群的李代数,SO表示特殊正交(special orthogonal)的意思, 特殊在detR=+1,用于表示空间中的旋转矩阵,其SO的定义如下
SO(n)={R∈Rn×n:RRT=I,detR=+1}
角速度表示
R可以表示空间中的旋转,那如果想知道空间旋转的角速度,是不是直接求导就行了?和他提出的疑问是一样的
姿态可以用旋转矩阵 R 表示,但角速度不能直接简单地写成 R˙,因为 R 有 9 个元素,而角速度只需要 3 个量来描述。
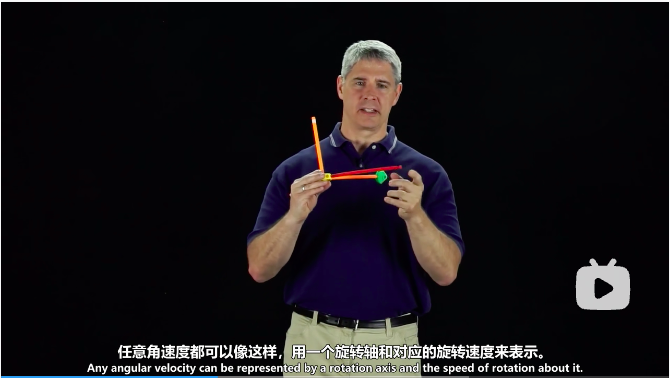
当然不能直接求导,因为矩阵里面有9个变量,只希望用三个变量来表示角速度,我们知道,角速度可以通过一个旋转轴和对应的旋转速度来表示
空间角速度
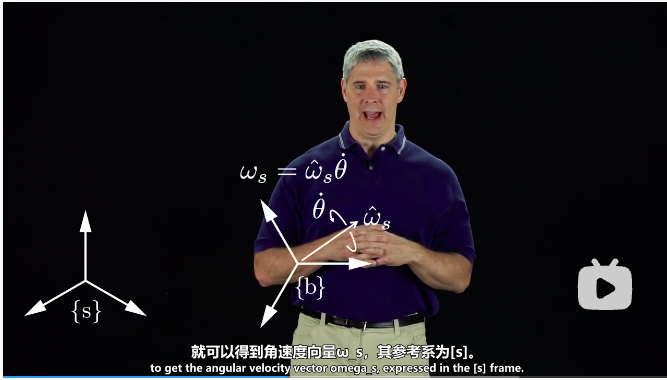
这里假设了旋转轴为ωs , 是一个相对于惯性坐标系,也可以称之为静止坐标系,为了单位的统一,这里可以假设旋转轴为单位旋转向量,其中单位向量的识别符为在上面加个帽子,即ω^s ,用单位旋转轴乘以其速率,即可得到角速度向量ωs ,即
ωs=θ˙ω^s
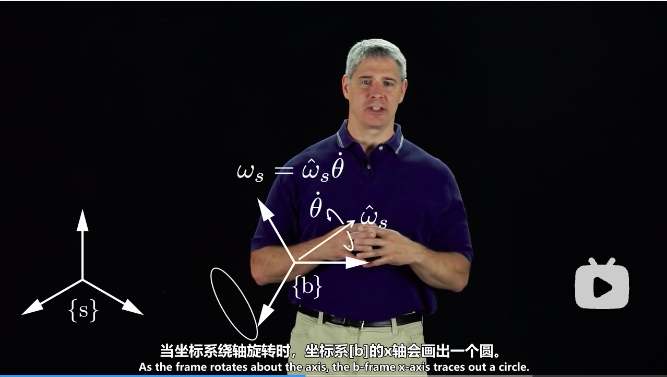
这样坐标系{b}在绕这个轴旋转时,其x轴方向将相对于s坐标系画一个圆,
不难得到,坐标系{b}的三个轴的速度可以表示为
x˙b=ωs×xb,y˙b=ωs×yb,z˙b=ωs×zb
利用括号运算符(表示叉乘), 通过上式,就可以直接得到如下关系式了(比直接看机器人操作的数学导论更容易理解,那书中就直接定义了,也没给出解释,搞得有点懵)
R˙sb=[x˙by˙bz˙b]=[ωs]Rsb
空间旋转轴的表示方法
相对于s坐标系的旋转矩阵一般可以省略下标,通过以上推导,就不难得到第一个重要的公式,即
[ωs]=R˙RT
当然,这里给出的角速度是相对于空间坐标系的,当然可以相对于物体坐标系,通过下标对消规则,ωb 可以表示为
ωb=Rbsωs=RsbTωs
下面得到第二个重要公式前,需要知道一个定理,即
R[ω]RT=[Rω]
这样不难推导出第二个重要公式,即
[ωb]=[RTωs]=RT[ωs]R=RT(R˙RT)R=RTR˙
物体角速度的解释
值得注意的是:ωb并不是相对动坐标系的角速度;确切地说,ωb 表示的是相对静坐标系{b}的角速度,{b}只是与运动刚体随动坐标系瞬时重合。另外还需要注意一点,这里无论对 R˙ 左乘还是右乘 RT 都会得到有关角速度的一个反对称矩阵,只是相对的坐标系不同。
更容易理解的推导
根据坐标变换公式:
ps=Rpb
对上式左右同时求导:
p˙s=R˙pb+Rp˙b
因为 p是附着在刚体上的, 所以p相对于刚体坐标系下的速度为0,故有
p˙s=R˙pb=R˙R−1ps
可以看出 R˙R−1 将点的位置变成了点的线速度。又有角速度和线速度的公式:
p˙s=[ωs]ps
所以有空间角速度
[ωs]=R˙R−1=R˙RT
对于自己而言,这种方式推导出的结果,记忆效果最佳;
参考
[1] 现代机器人学
[2] 机器人学笔记——中科院软件所
