- 简介
- KDL 源码下载
- SDH 参数作为运动学模型的输入
- 概念描述
- 正运动学求解器
- 逆运动学求解器
- TRAC_IK逆解调用
- 问题及解释
- Gazebo 仿真部分
- 找不到要链接的动态链接库路径
- 其他未归类事项
- 参考
简介
KDL(Kinematics and Dynamics):机器人运动学与动力学组件,是MoveIt!中的默认运动学插件,在使用MoveIt Setup Assistant进行模型配置时,可以进行配置。学习机器人路径规划、轨迹规划、逆解算法,甚至编程的话,是一个很好的学习素材; 本文的测试环境为: Ubuntu 20.04.2 ARM64, 以埃夫特机器人通用六轴工业机器人为例来说明如何调用KDL的正逆运动学求解部分; 下面简单对相关运动学求解器做个简单的介绍:
(1)KDL
KDL(Kinematics and Dynamics Library)是MoveIt!中的默认运动学插件,其有自己的优缺点,优点在于可求解封闭情况下逆运动,缺点在于速度慢,同时可能找不到解。
(2)TRAC-IK
TRAC-IK和KDL类似,也是一种基于数值解的运动学插件,但是在算法层面上进行了很多改进,求解效率高了很多。可通过如下方式安装(个人使用的是noetic版本)
sudo apt-get install ros-noetic-trac-ik-kinematics-plugin |
(3)IKFAST
IKFAST是一种基于解析算法的运动学插件,可以求解任意复杂运动链的运动学方程并保证每次求解的一致性,整体来说,IKFAST比较稳定快速,一般5us的速度可完成运算。
3.MoveIt!运动插件开发方法
MoveIt!并不提供算法源码,只是将算法按照约定的方法进行封装,算法是数学模型的代码实现,和MoveIt!本身并没有关系,如果需要集成功能算法到MoveIt!中,需要编写接口文件,满足MoveIt!的插件规范即可,然后向move_group进行注册,这样使用时即可通过yaml或launch文件进行直接的调用。
KDL 源码下载
首先,下载KDL源码
cd ~/Destop |
再需要安装相关依赖
sudo apt-get install liborocos-kdl-dev |
第一步,确认是否配置成功,输入如下命令行
cd orocos_kinematics_dynamics/orocos_kdl/ |
后,会得到如下图像
然后在命令行中输入make,看编译是否成功,如下图所示

SDH 参数作为运动学模型的输入
在编写代码前,需要对DH参数进行转换,转换成KDL能够识别的内容,进行正逆运动学的计算,下面给出具体的代码(main.cpp)
#include <iostream> |
以及对应的CmakeLists.txt如下
cmake_minimum_required (VERSION 3.0.2) |
另外需要修改在最上层的CMakeLists.txt, 加入build的目录,即可, 如下所示
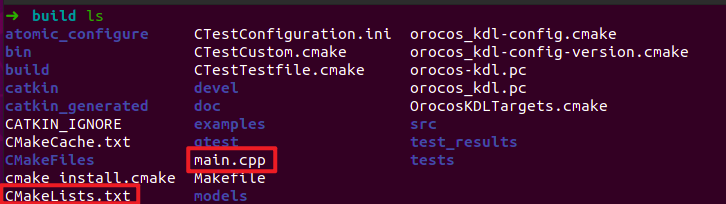
加入完这段指令后,回到build目录,输入cmake .., 在build目录中,能够看到如下内容(重要的就只有main.cpp与CMakeLists.txt了)
直接在命令行中make即可,如下图所示
这样就成功了,然后通过如下指令,运行编译出来的结果
cd ../devel/lib/orocos_kdl |
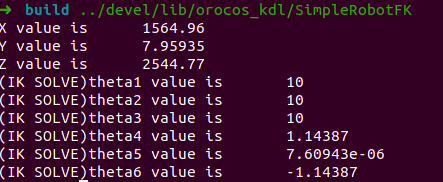
至此,基本上运动学正逆解部分就已经结束了,这里采用的是标准DH(SDH)建模,对于工业机器人来说,SDH和MDH其实差别不大,主要体现在机器人标定以及动力学递归推导的简洁性,当然,KDL里面也提供了MDH以及旋量等方式进行的运动学建模,仅作为示例, 不一一列举;
概念描述
按照上面的例子,可以开始将这一工具用起来了,下面记录一些相关的概念;KDL描述机器人的方式分别是段,链,与树,可用于串并联机器人的描述;
机器人描述最小单元:Segment
机器人最小结构所需要的参数:关节、坐标、连杆质量、连杆惯性张量
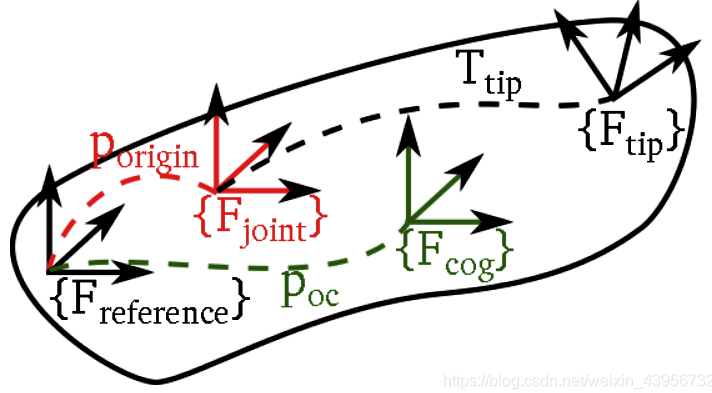
其中 oc表示质心;在图中可以看出,segment拥有一个参考坐标系、关节坐标系、质心坐标系,tip坐标系,其中参考坐标系通常与关节坐标系重合,tip坐标系用于描述杆件姿态,同时作为下一个segment的参考坐标系,质心坐标系与参考坐标系同向。在KDL中采用三个结构体来描述,关节、坐标,刚体惯量;
关节 joint描述
KDL源码对此部分的构造函数如下图所示

各个含义解释如下:
-
1 关节名字:name
-
2 原点:origin
-
3 轴:_axis
-
4 关节类型:JointType
-
JointType = Fixed (表示被固定的关节)
RotAxis
RotX
RotY
RotZ
TransAxis
TransX
TransY
TransZ -
5 减速比:scale,一般默认设置就可以,需要注意的是KDL里面没有耦合比,要做电机关节转换的时候需要自己写一个函数;
6 偏置:offset -
7 惯量:inertia,绕转动轴的一维惯量
-
8 阻尼:damping
-
9 刚度:stiffness
连杆动力学参数:RigidBodyInertia
连杆的动力学参数包括了三个量:
-
1 质量:m
-
2 质心:oc
-
3 惯性张量矩阵:Ic
RotationalInertia(double Ixx=0,double Iyy=0,double Izz=0,double Ixy=0,double Ixz=0,double Iyz=0)
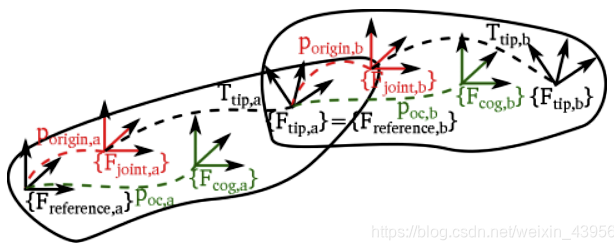
串联机器人链:Chain
由基本元素段segment相连,构成了一个串联的链,
建立树:tree
一般,树不会直接代码建立,而是采用更简单的方法,通过URDF文件获取,获取方法如下所示。
from urdf_parser_py.urdf import URDF |
正运动学求解器
-
必须为每个链创建一个单独的求解器;
-
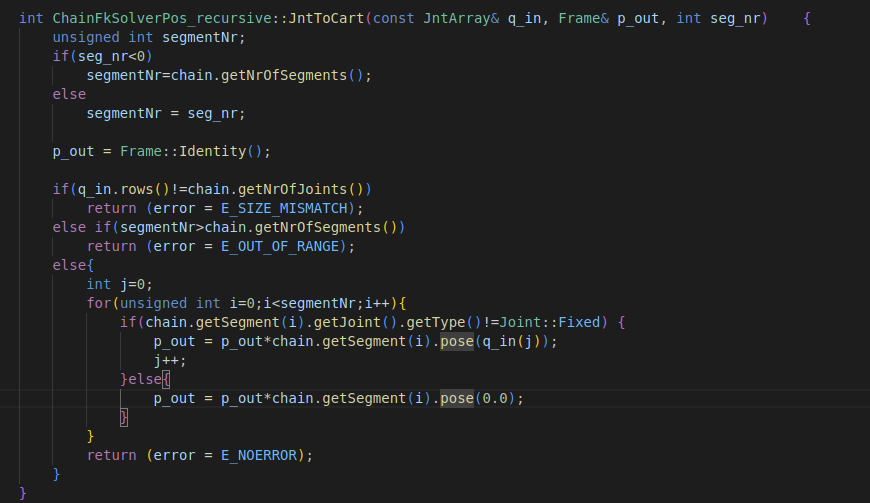
正运动学函数
JntToCart(),从关节空间值计算笛卡尔空间值,逆运动学试用功能CartToJnt(),从笛卡尔空间值计算关节空间值; -
KDL提供了关节运动学(从目前所看代码来说,并没有从电机角度到关节角度的转换,即无耦合比,但是有一个scale即传动比,所以推测是关节运动学)和动力学(关节动力学),考虑了从关节空间到笛卡尔空间的正逆运动学;
-
JntToCart方法: 求解关节空间到某一个segment笛卡尔空间的正运动学(位置或速度);当segmentNr=-1(默认值), 从基座解算到法兰端,当segmentNr>0如segmentNr=3时,对应的结果为
逆运动学求解器
chainIksolver.hpp中有两个抽象类
- ChainIkSolverPos
- ChainIkSolverVel
- ChainIkSolverAcc(带有关节加速度约束的求解)
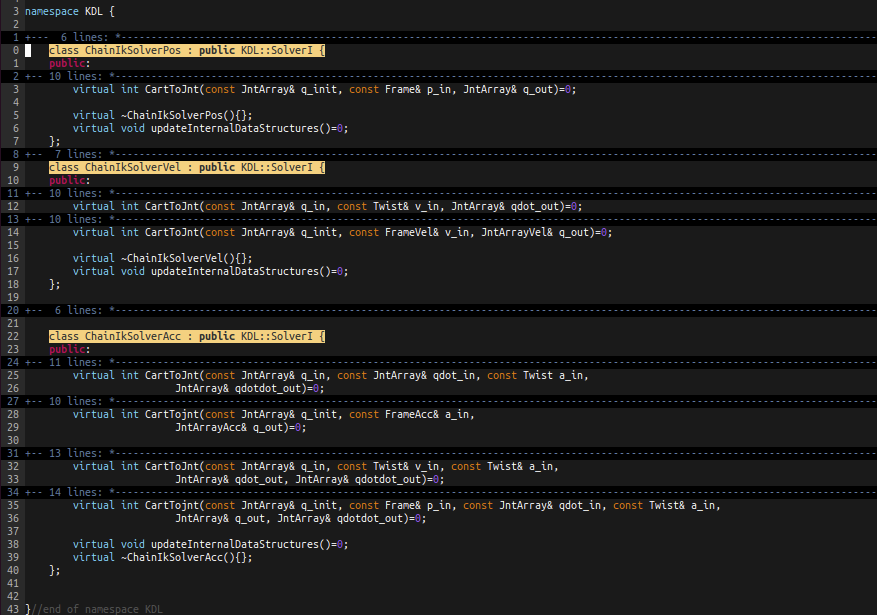
KDL逆解采用的数值解法其中:
- 位置求解有三种(Levenberg Marquardt(非线性最小二乘优化问题的算法, 结合了梯度下降和牛顿法的优点), Newton Raphson(基于泰勒展开的思想,将非线性函数线性化,从而在每次迭代中逐步逼近函数的根), Newton Raphson(关节限位))

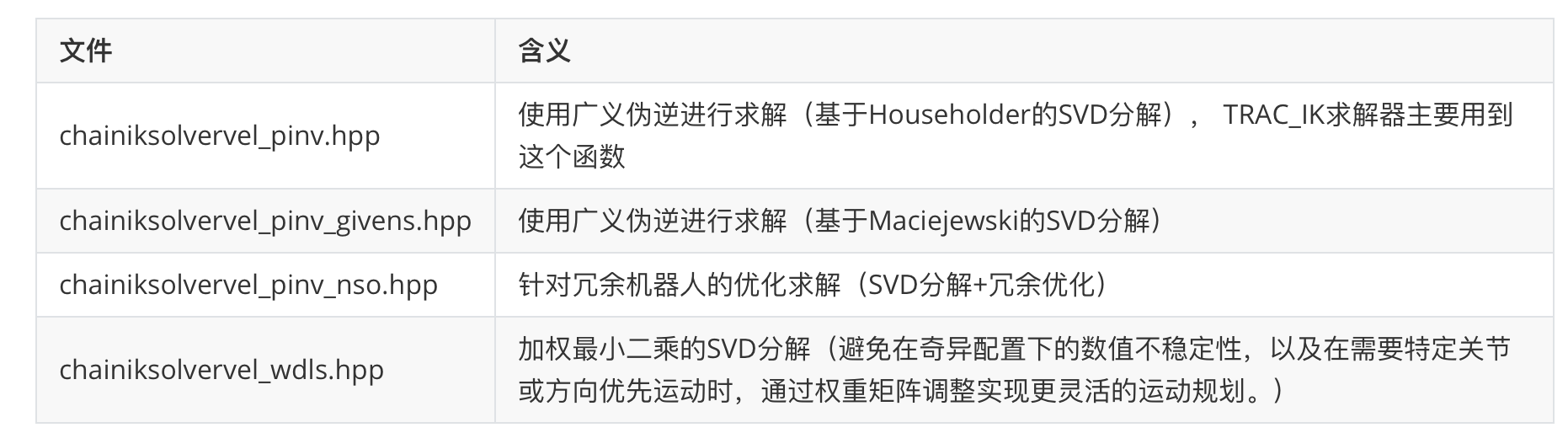
- 速度求解有四种(SVD分解及其优化)
TRAC_IK逆解调用
参考代码示例
#include <ctime> |
问题及解释
1.KDL的inverse Jacobian和TRAC_IK的inverse Jacobian区别?
TRAC_IK 主要使用了 KDL 的 ChainIkSolverVel_pinv 来计算雅可比矩阵的伪逆,并基于非线性优化库 NLOPT 来进行求解。具体来说,TRAC-IK 结合了 KDL 提供的伪逆方法和 NLOPT 的优化算法,来提高逆运动学求解的效率和成功率。所以并没有新的雅可比求解的方式。
2.KDL中的joint limit包括哪些?
KDL的关节限制仅用于求解的,比如求解带有关节限制情况下,可用KDL中的ChainIkSoverPos_NR_JL来计算;另外提供了锁轴的计算方式, 相关内容可直接去看源码。
3.KDL求解成功率低,你认为主要问题在哪儿?
个人认为主要问题在于初始猜测、奇异性、关节限制处理、数值稳定性(如迭代次数, 阈值的设定)和运动学链复杂性等因素。
4.TRAC-IK非线性求解中cost function是什么?约束条件包括哪些?
在 TRAC-IK 中,cost function 被定义为机器人位置和姿态(法兰端)与期望目标(如果带有工具参数,需要转到法兰端)之间的误差。
约束条件只有关节限制,通过成本函数与约束条件限制,然后调用开源的非线性优化求解器NLOPT来进行求解。
Gazebo 仿真部分
ERROR: cannot launch node of type [robot_state_publisher/state_publisher]:解决方法
解决方法为修改/launch/display.launch文件中的 robot_state_publisher节点的 type为“robot_state_publisher”即可。
demo_gazebo无法启动
所报的问题如下
Error [parser.cc:488] parse as old deprecated model file failed. |
解决方式,屏蔽掉相关代码,参考如下
<transmission name="trans_joint_6"> |
但是屏蔽掉后,无法在gazebo中做控制, 最后还是要对此部分内容做修改, 加入PID参数等。
gazebo仿真掉轴
排查是否由于使用solidworks导出文件有误
在gazebo中将重力(gravity)关闭,观察机器人是否正常起立, 若能正常起立,则为ros_gazebo_control部分没有配置好;ros_gazebo_control的控制参数形式如下:
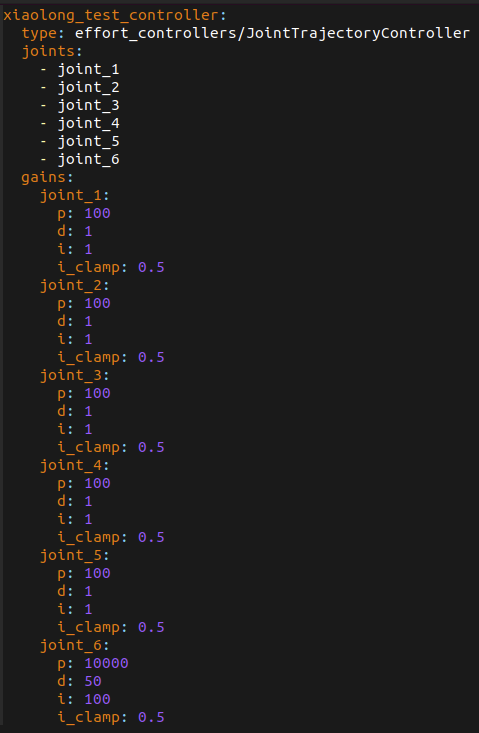
其中i_clamp为积分限幅(相当于死区控制),防止积分项过度累积,导致控制器输出不稳定的影响;
找不到要链接的动态链接库路径
编译正常,但是运行的时候会报出如下的错误
error while loading shared libraries: liborocos-kdl.so.1.5: cannot open shared object file: No such file or directory |
那么在编译时需指明运行时链接的库的位置,参考代码如下所示(l为小写的L,且-Wl逗号后面不能有空格)
g++ main.cpp -lorocos-kdl -Wl,--rpath=/usr/local/lib |
注意事项
在安装了ROS的情况下,KDL库的相关路径已经被添加到环境变量中,则可以直接链接,否则需要给出库的完整路径,此外,若有添加库路径到环境变量中的方法,应该也可以实现仅给出库的名称而不列出完整路径
其他未归类事项
建立软连接(用于自己修改KDL源码并在ROS中仿真):
sudo ln -s /usr/local/lib/liborocos-kdl-models.so /usr/local/include/ |
参考
[1] Orocos-KDL-Forward-Kinematics
