前言
对moveit的使用进行简单的记录, 可能是对于用其他人已创建好的模型的使用的最快方法;
moveit leaning
起初在github项目中看到的这个,于是就自己尝试复现一下作者的操作,首先,搞定moveit配置环境(根据自己版本去替换,笔者自己用的是noetic)
sudo apt-get install ros-noetic-moveit |
进入ROS工程的存放地址, 并下载源码
cd ~/catkin_ws/src |
需要注意的是,此项目是基于kinetic建立的,因此需要将原项目中的kinetic全部替换成noetic, 这个比较简单,可以通过vim来查询含有这个关键词的位置,直接替换即可,参考指令如下
vim ~/catkin_ws/src/ |
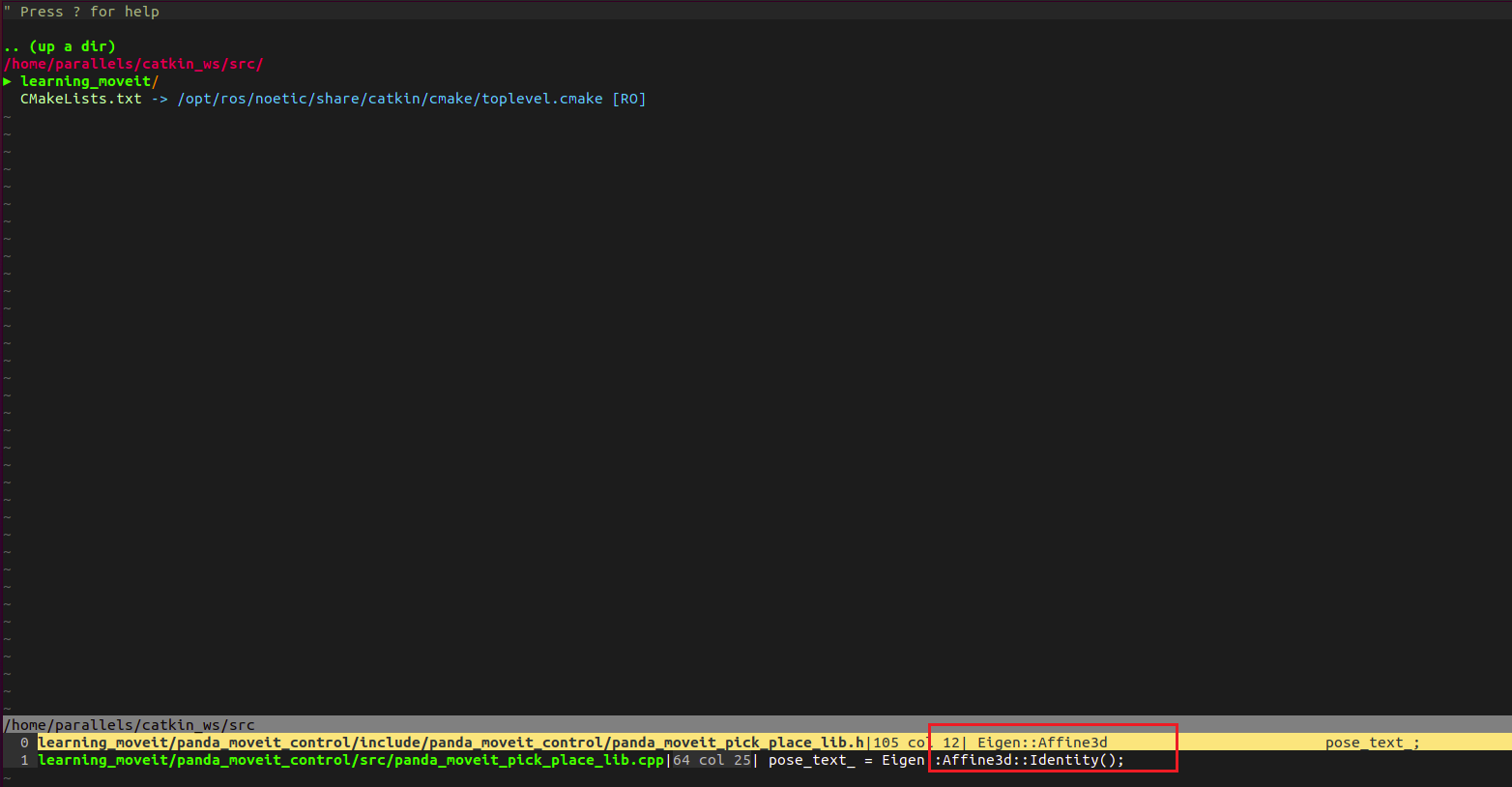
找到后替换即可,但是到编译的时候会报错,报错信息如下
error: static assertion failed: YOU_PREFORMED_AN_INVALID_TRANSFORMATION_CONVERSION |
这个是因为Eigen库更新时API的迁移问题,类似的采用vim查找关键词Affine3d, 替换成Isometry3d即可,如下图所示,为查找出来的两个地方
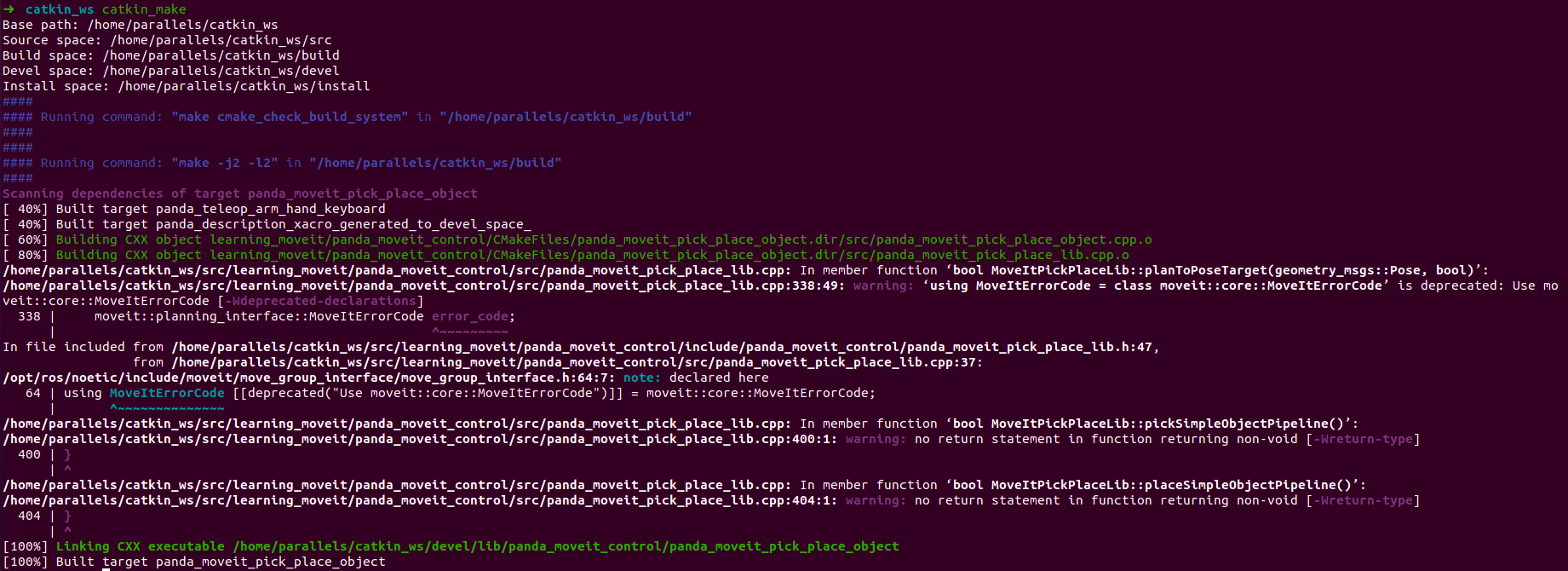
接下来进行编译
cd ~/catkin_ws |
编译成功,结果如下所示
接下来根据作者的给出的操作进行,不过最后没法显示出机器人,结果如下
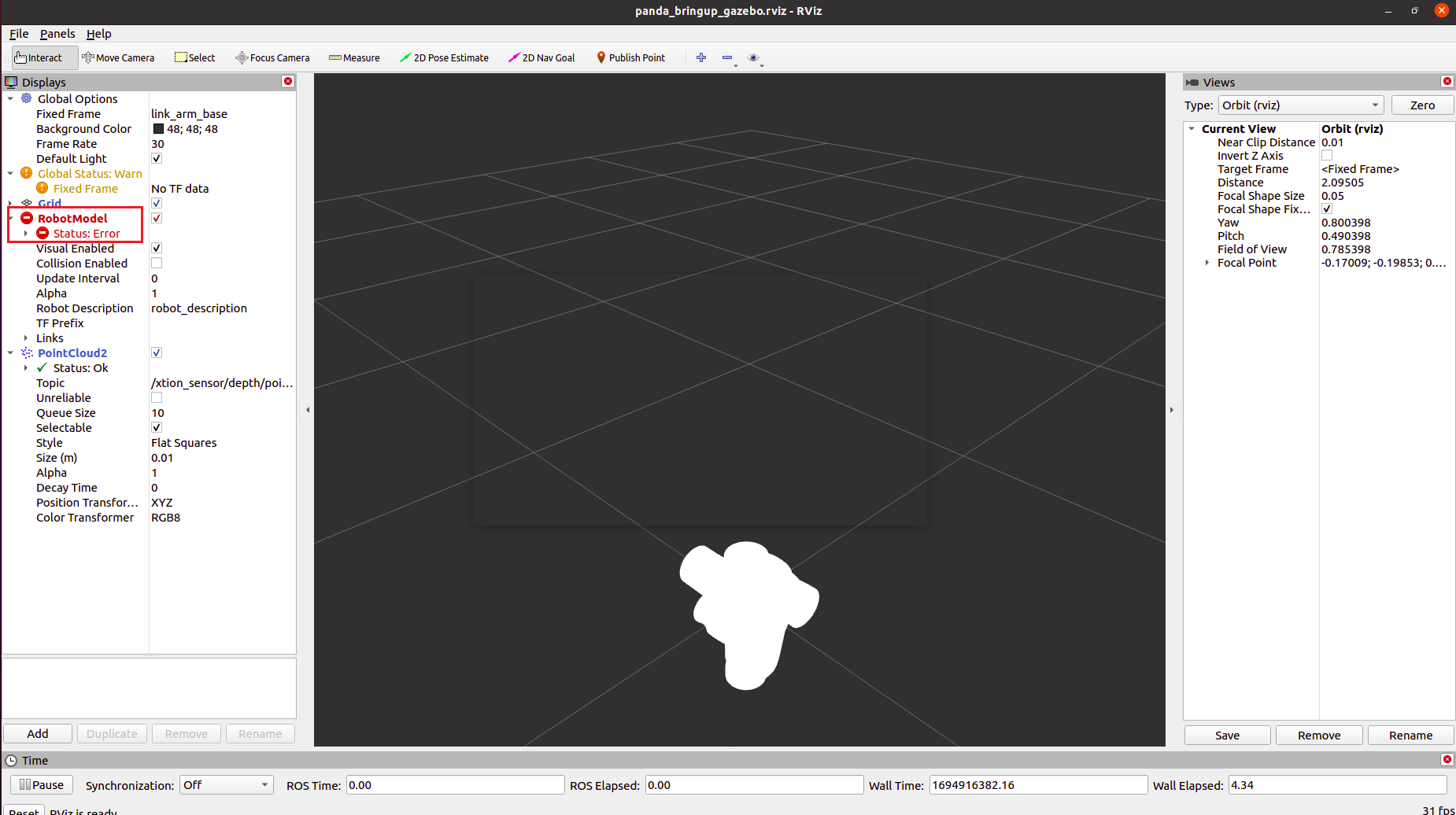
毕竟是五年前的东西,可以采用比较新的版本去搞,所以就没接着研究下去了,感觉是一个很好的开始,花了我半天的时间才编译通过,有一点小小的惊喜,哈哈哈~
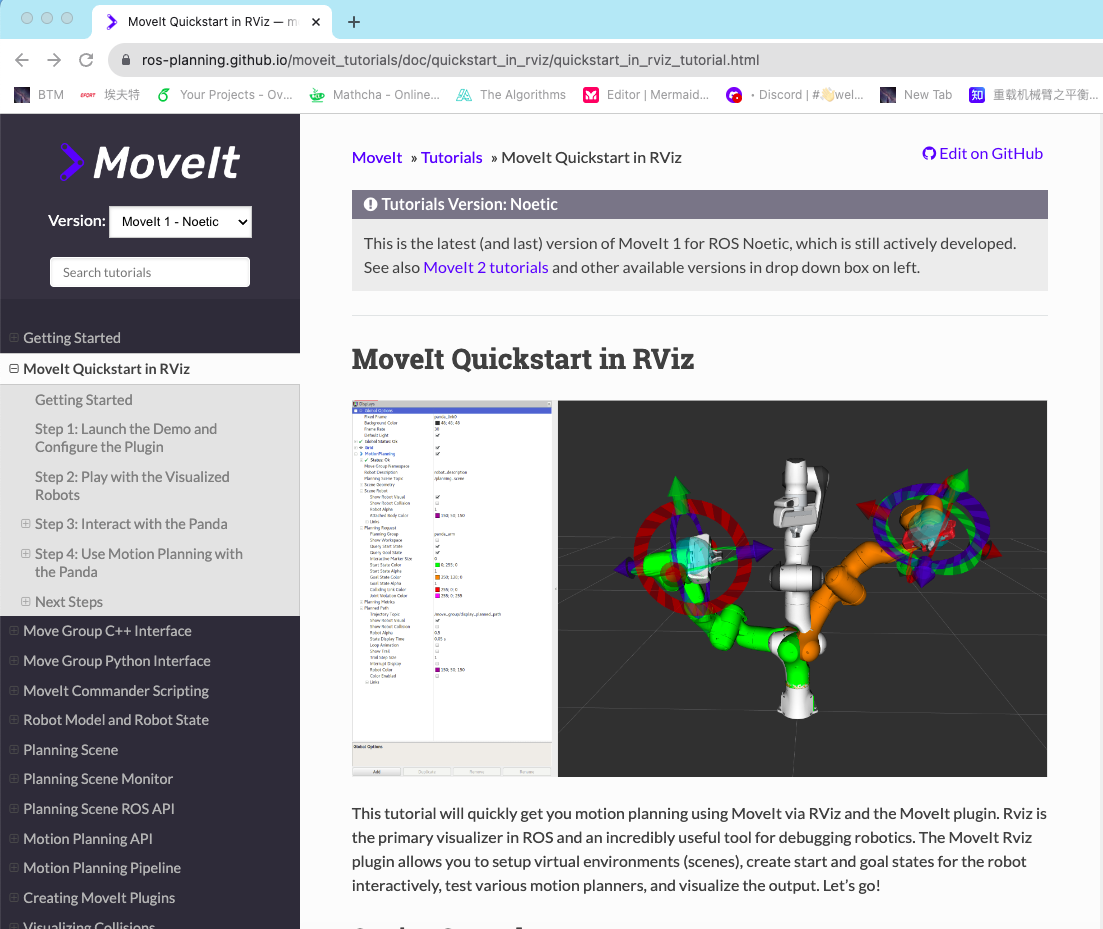
moveit tutorials
这部分则是 moveit 官网给出来的教程了,通过他们的教程,可以真实的创建一些机器人,把目前跑通了的给记录下来(Ubuntu 系统中), 这里假设之前已进行好相关的配置,比如在zshrc中加入了source ~/catkin_ws/devel/setup.zsh等等, 官方界面如下所示
环境配置
相关依赖安装
由于自己已经安装好了 noetic 和 moveit, 所以只需要安装下面的即可
sudo apt install python3-catkin-tools |
示例代码下载
cd ~/catkin_ws/src/ |
构建cakin 工作空间
cd ~/catkin_ws/src |
在 RViz 中运行
开启示例
roslaunch panda_moveit_config demo.launch rviz_tutorial:=true |
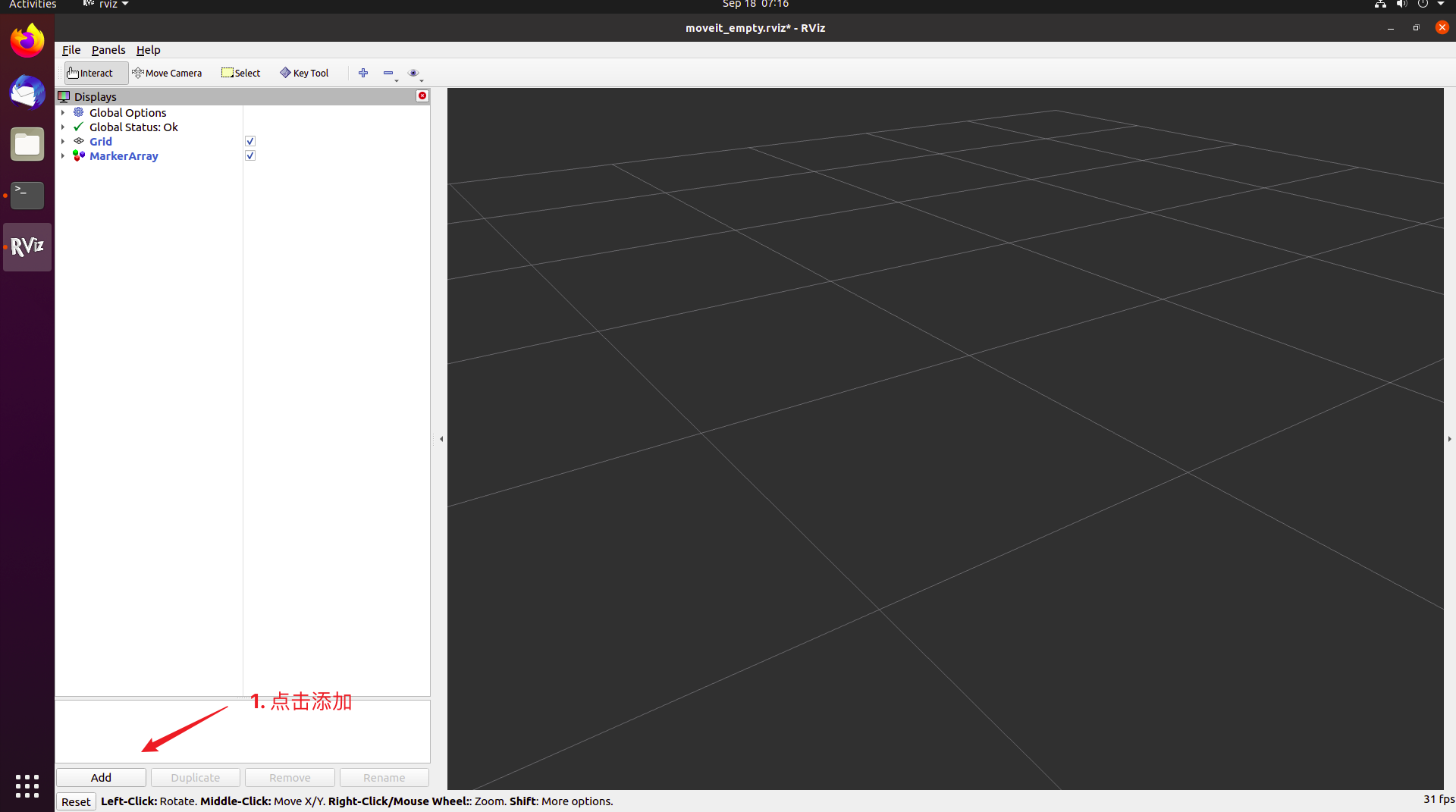
可以看到一个空的界面,如下所示
![]()
添加运动规划插件
然后选中运动规划的插件
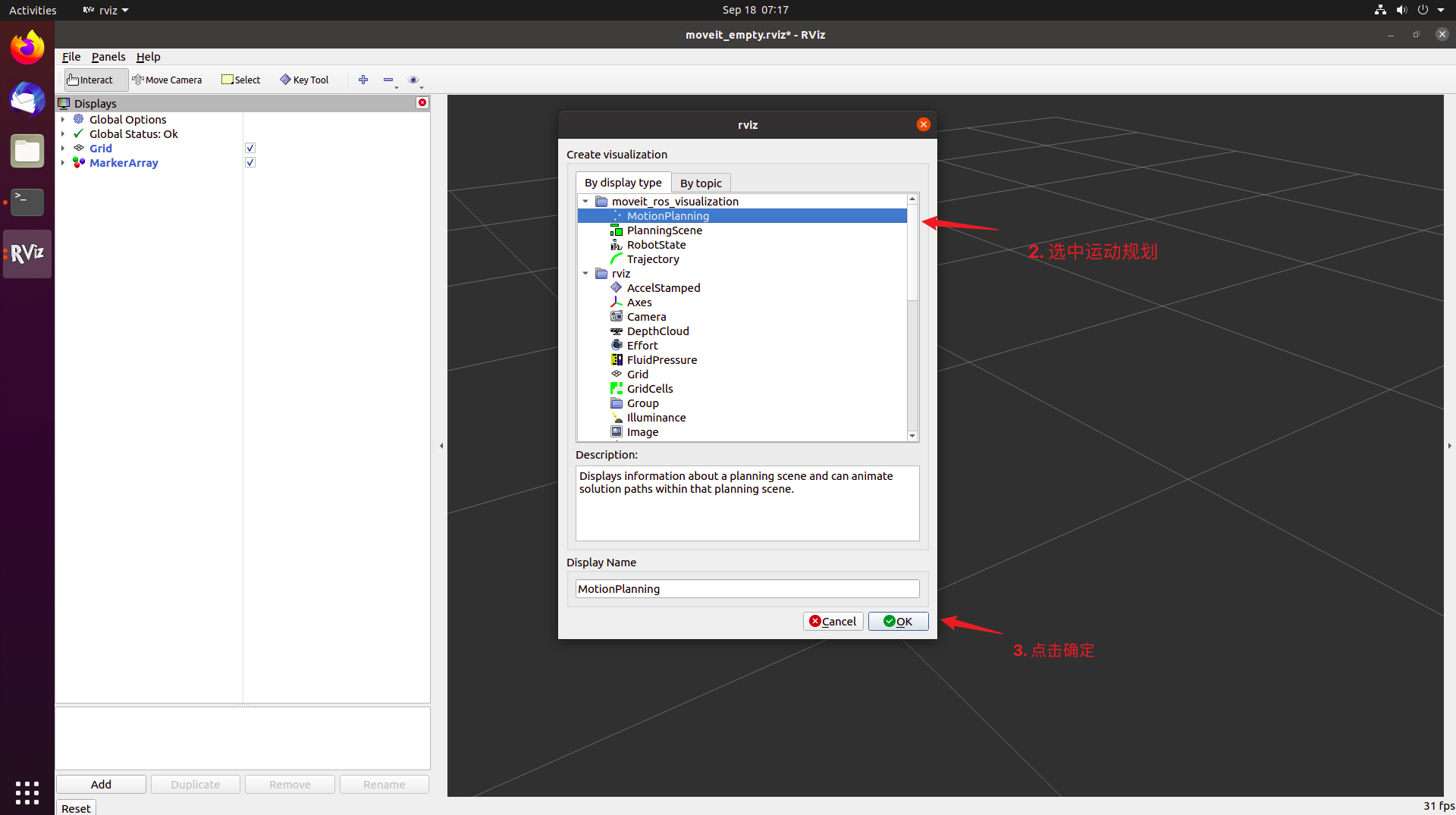
确定后得到的结果如图所示
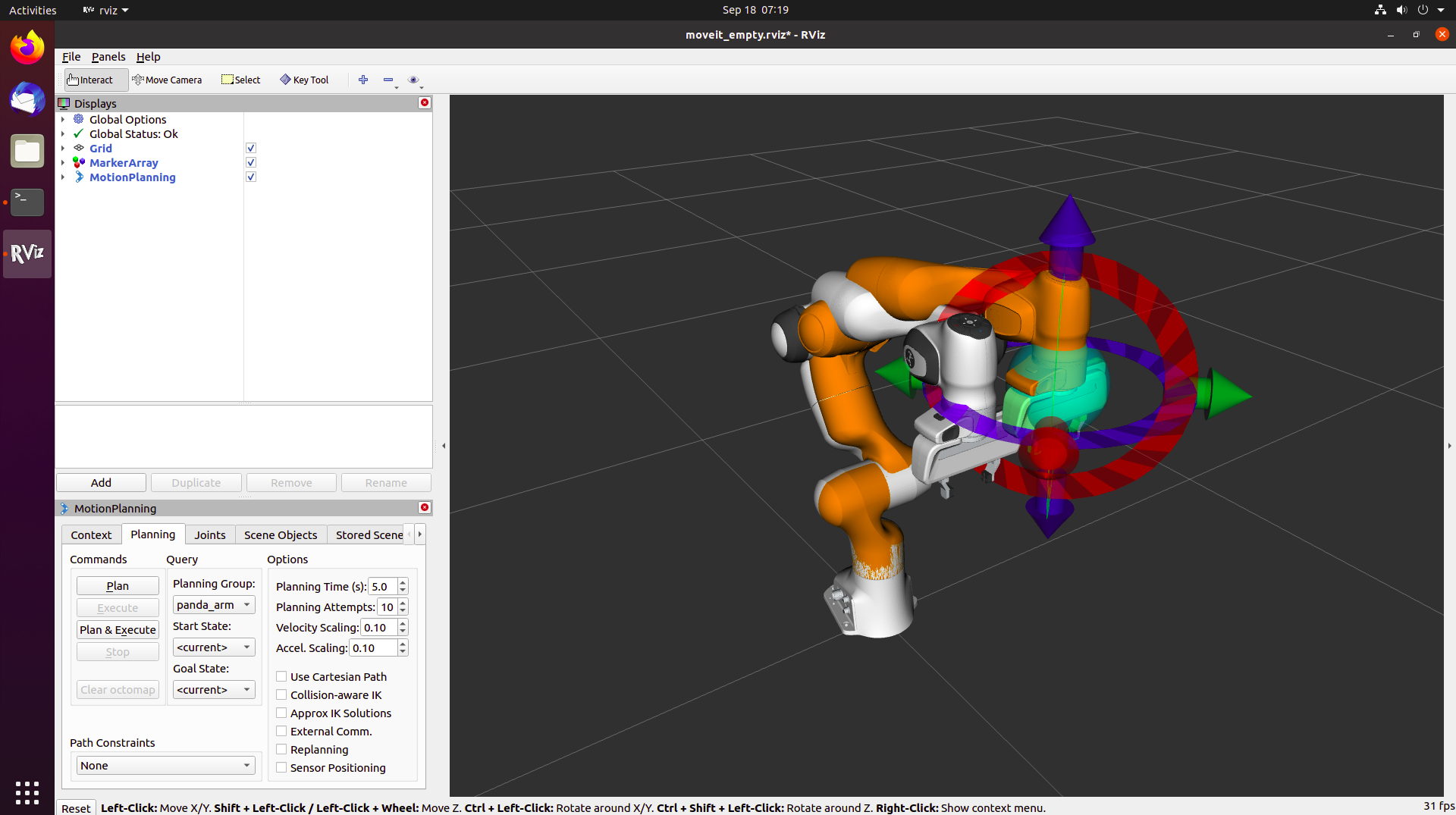
现在可以手动拖动末端,进行相关的规划了,如下所示

界面中还提供了很多丰富的选项,这里就不一一列举了,建议去官网浏览一遍;
参考
[1]. moveit 官方教程
