Articulated-Body Algorithm (ABA) 笔记
简介
Articulated-Body Algorithm(简称 ABA)是 Featherstone 提出的机器人动力学高效算法,主要用于 前向动力学(Forward Dynamics) 计算:
输入:
- 关节位置 q
- 关节速度 q̇
- 关节力矩 τ
输出:
- 关节加速度 q̈
算法优势:
与传统方法相比,ABA 避免了质量矩阵 M(q) 的显式求逆,将复杂度从 O(n³) 降到 O(n)(n 为关节数)。
动力学背景
动力学方程
符号说明:
- M(q):质量矩阵
- h(q, q̇):科氏力、离心力、重力等非线性项
- τ:广义力矩
传统求解方法
直接解需要:
问题:矩阵求逆计算代价高(O(n³) 复杂度)
ABA 解决方案:通过递归传播替代矩阵求逆,避免显式计算 M⁻¹
算法流程
ABA 采用三步递归策略:
Step 1: 前向遍历(Forward Pass)
方向:从基座 → 末端
计算内容:
- vᵢ:每个关节的空间速度
- cᵢ:偏加速度(Coriolis/重力项)
Step 2: 反向遍历(Backward Pass)
方向:从末端 → 基座
计算内容:
- Iᵢ*:有效惯性(articulated-body inertia)
- pᵢ*:偏广义力
关键操作:聚合子关节的信息,逐层往上传递
Step 3: 前向求解(Forward Pass)
方向:从基座 → 末端
计算内容:
- 解出每个关节的加速度 q̈ᵢ
- 结合 τ 和上一步结果,传播最终加速度
算法示意图
三关节机械臂的递归传播
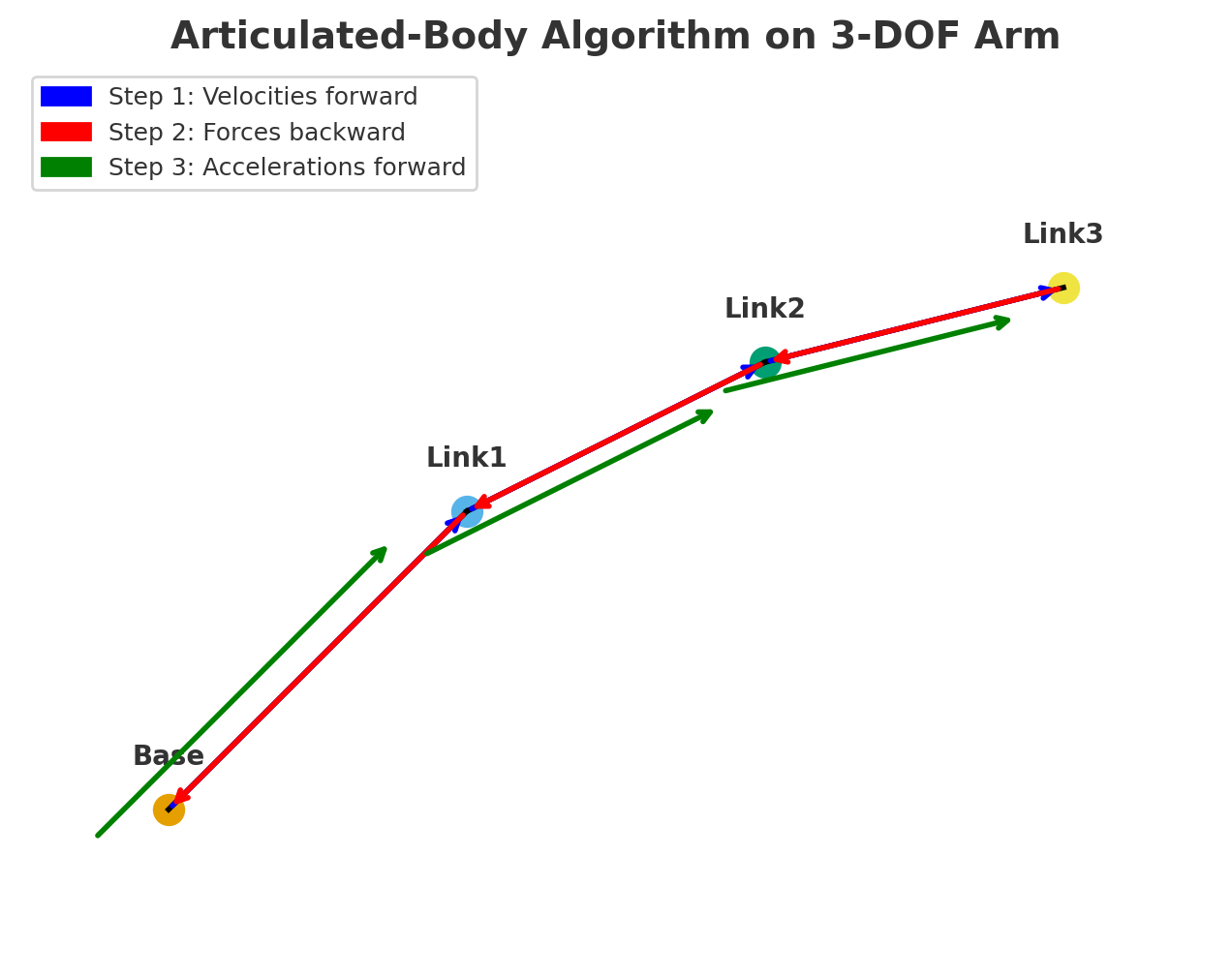
图例说明:
- 蓝色箭头:速度/偏加速度从基座传到末端
- 红色箭头:力和惯性从末端传回基座
- 绿色箭头:加速度从基座传到末端
应用场景
机器人仿真引擎
- Gazebo
- MuJoCo
- Isaac Sim
动力学库
- RBDL
- Pinocchio
- Drake
控制算法
- 模型预测控制(MPC)
- 强化学习(RL)
- 其他需要实时动力学计算的场景
伪代码示例
function ABA(q, qd, tau): |
参考文献
R. Featherstone, The Calculation of Robot Dynamics Using Articulated-Body Inertias, International Journal of Robotics Research, 1983.
R. Featherstone, Rigid Body Dynamics Algorithms, Springer, 2008.
Pinocchio / RBDL 源码实现
